隨著物聯網與智能交互技術的快速發展,手勢控制機器人正成為人機交互領域的熱點之一。本文介紹了一種結合Arduino微控制器與射頻(RF)集成電路的手勢控制機器人系統,該系統能夠通過用戶手勢動作實現機器人的無線遠程控制,具有響應迅速、操作直觀、擴展性強等優點。
一、系統架構與工作原理
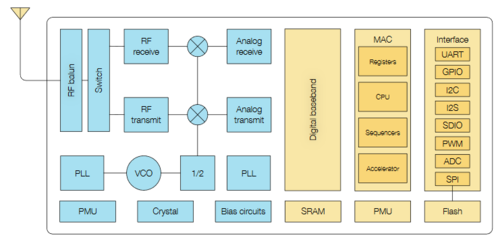
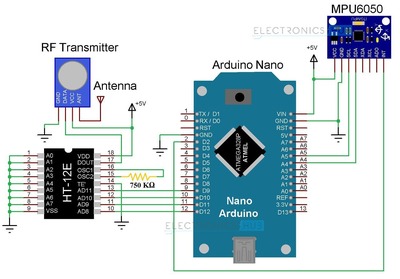
手勢控制機器人系統主要由三部分組成:手勢采集模塊、Arduino控制中心與RF通信模塊、機器人執行單元。手勢采集模塊通常采用加速度計或陀螺儀傳感器(如MPU6050)捕捉用戶手部動作,通過I2C接口將數據傳送至Arduino Nano或Uno控制器。控制器對傳感器數據進行濾波與特征提取,識別出預設手勢(如上下擺動、左右旋轉等),并將其編碼為控制指令。隨后,指令通過RF集成電路(如NRF24L01)以2.4GHz頻段發送至機器人端。機器人本體的接收器通過相同RF模塊獲取指令,由另一Arduino控制器解析后驅動電機或舵機執行相應動作,如前進、轉向或機械臂操作。
二、硬件設計與關鍵組件
- 手勢采集端:采用低功耗Arduino板與MPU6050傳感器組合,確保手勢檢測的實時性與準確性。傳感器數據通過卡爾曼濾波算法處理,以消除噪聲干擾。
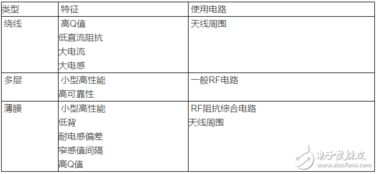
- RF通信模塊:NRF24L01芯片作為核心,其具備多頻道通信與自動應答功能,有效傳輸距離可達百米(視環境而定),且功耗較低,適合電池供電的移動應用。
- 機器人執行端:基于Arduino的電機驅動電路(如L298N模塊)控制直流電機,結合底盤結構與輪式/履帶設計,實現靈活運動。若需復雜操作(如抓取),可擴展舵機模塊。
三、軟件實現與算法優化
Arduino程序基于C++語言開發,分為發送端與接收端兩個部分。發送端代碼負責讀取傳感器數據,通過閾值判斷與模式匹配識別手勢,例如:
- 手勢“上劃”對應機器人前進;
- 手勢“下劃”對應機器人后退;
- 手勢“左旋”對應左轉。
接收端代碼監聽RF信號,解析指令后輸出PWM信號控制電機轉速與方向。為提升系統魯棒性,引入了校驗機制與指令重發策略,避免因信號丟失導致誤動作。
四、應用場景與優勢分析
此類手勢控制機器人可廣泛應用于教育演示、智能家居輔助、危險環境探索等領域。其核心優勢在于:
- 無需物理接觸,操作體驗自然直觀;
- RF通信抗干擾能力強,適合復雜環境;
- Arduino開源生態支持快速原型開發與功能擴展。
未來,通過集成機器學習算法優化手勢識別精度,或結合Wi-Fi/藍牙模塊實現多模態控制,將進一步拓展系統的實用性。
結語
基于Arduino與RF集成電路的手勢控制機器人,以其低成本、高靈活性的特點,為人機交互技術提供了可行的實踐方案。通過硬件集成與軟件優化,該系統不僅降低了開發門檻,也為智能機器人控制領域的創新應用奠定了基礎。